Soal Transformasi
Dasya Putrinda H. (08) XI IPS 2
1. Bayangan titik P(a,b) oleh rotasi terhadap titik pusat (0,0) sebesar −90∘ adalah P′(−10,−2). Nilai a+2b=⋯⋅
Konsep rotasi:
Koordinat bayangan titik (x,y) bila dirotasikan pada pusat (0,0) sebesar sudut θ berlawanan jarum jam adalah
(x′y′)=(cosθ−sinθsinθcosθ)(xy)
Untuk (x′,y′)=(−10,−2) dan θ=−90∘, diperoleh
(−10−2)=(cos(−90∘)−sin(−90∘)sin(−90∘)cos(−90∘))(xy)(−10−2)=(01−10)(xy)(−10−2)=(y−x)Diperoleh y=−10 dan x=2. Dengan demikian, koordinat titik P adalah (2,−10). Untuk itu, a=2 dan b=−10, sehingga
a+2b=2+2(−10)=−18a+2b=2+2(−10)=−18
2. Bayangan titik A dengan A(−1,4) jika direfleksikan terhadap garis y=−x adalah ⋯⋅
⋯⋅
Apabila titik A(x,y) direfleksikan terhadap garis y=−x, maka bayangan titik A adalah A′=(−y,−x).
Jadi, bayangan titik A(−1,4) adalah A′(−4,1).
3. Diketahui koordinat titik P(−8,12). Dilatasi [P,1] memetakan titik (−4,8) ke titik ⋯⋅Konsep dilatasi: Jika titik (x,y) didilatasikan dengan pusat (a,b) dan faktor skala k, maka bayangan titiknya berada di koordinat (k(x−a)+a,k(y−b)+b).
Bayangan titik (−4,8)) setelah didilatasikan dengan pusat (−8,12) dan faktor skala 1 adalah(1(−4−(−8))+(−8),1(8−12)+12) =(−4,8)
Dilatasi [P,1] memetakan titik (−4,8) ke titik (−4,8)(−4,8)
4. Bayangan kurva  jika dicerminkan terhadap sumbu x dilanjutkan dengan dilatasi pusat O dan faktor skala 2 adalah ….
jika dicerminkan terhadap sumbu x dilanjutkan dengan dilatasi pusat O dan faktor skala 2 adalah ….
Pembahasan:
Matriks transformasi pencerminan terhadap sumbu x:
![\[ T_{1} = M_{sb-x} = \begin{pmatrix} 1 & 0 \\ 0 & -1 \end{pmatrix} \]](https://idschool.net/wp-content/ql-cache/quicklatex.com-ecfc69d776a6bab77ecabec8f8ce6e2b_l3.svg "Rendered by QuickLaTeX.com")
Matriks transformasi dilatasi pusat O dan faktor skala 2:
![\[ T_{2} = [O,k=2]= \begin{pmatrix} 2 & 0 \\ 0 & 2 \end{pmatrix} \]](https://idschool.net/wp-content/ql-cache/quicklatex.com-f5d0747c9b60126d4f0c231768be1d85_l3.svg "Rendered by QuickLaTeX.com")
Matriks transformasi untuk pencerminan terhadap sumbu x dilanjutkan dengan dilatasi pusat O dan faktor skala 2:
![\[ \left(T_{2} \cdot T_{1} \right) = \begin{pmatrix} 2 & 0 \\ 0 & 2 \end{pmatrix} \begin{pmatrix} 1 & 0 \\ 0 & -1 \end{pmatrix} = \begin{pmatrix} 2 & 0 \\ 0 & -2 \end{pmatrix} \]](https://idschool.net/wp-content/ql-cache/quicklatex.com-23bb7fd6cb89e2eba0d0fdf459497e0d_l3.svg "Rendered by QuickLaTeX.com")
Matriks transformasi untuk menentukan bayangan:
![\[ \begin{pmatrix} x' \\ y' \end{pmatrix} = \begin{pmatrix} 2 & 0 \\ 0 & -2 \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix} \]](https://idschool.net/wp-content/ql-cache/quicklatex.com-d2047c257f183f546288a70231caffa2_l3.svg "Rendered by QuickLaTeX.com")
![\[ = \begin{pmatrix} 2x \\ -2y \end{pmatrix} \]](https://idschool.net/wp-content/ql-cache/quicklatex.com-15c90168e17264551f432bddf001a077_l3.svg "Rendered by QuickLaTeX.com")
Sehingga diperoleh dua persamaan:
![\[ x = \frac{1}{2}x' \]](https://idschool.net/wp-content/ql-cache/quicklatex.com-b6b4ff05b928806de66050452245a587_l3.svg "Rendered by QuickLaTeX.com")
![\[ y = - \frac{1}{2}y' \]](https://idschool.net/wp-content/ql-cache/quicklatex.com-94f5c9efd5c95b11946e26f09e4049fb_l3.svg "Rendered by QuickLaTeX.com")
Jadi, bayangan kurva jika dicerminkan terhadap sumbu x dilanjutkan dengan dilatasi pusat O dan faktor skala 2 adalah
![\[ \frac{1}{2}y' = \left(\frac{1}{2} x \right )^{2} - 3 \]](https://idschool.net/wp-content/ql-cache/quicklatex.com-6609c42c4e6ef06aa60b164891a15fe3_l3.svg "Rendered by QuickLaTeX.com")
![\[ y = \frac{1}{2}x^{2} - 6 \]](https://idschool.net/wp-content/ql-cache/quicklatex.com-c38286d93246da387539f6bfe7f54384_l3.svg "Rendered by QuickLaTeX.com")
5. Garis y = -3x + 1 diputar dengan  kemudian dicerminkan terhadap sumbu x. Persamaan bayangannya adalah ….
kemudian dicerminkan terhadap sumbu x. Persamaan bayangannya adalah ….
Pembahasan:
Matriks transformasi oleh rotasi dengan R(O, 90o):
![\[ T_{1} = R(90^{o}) = \begin{pmatrix} 0 & -1 \\ 1 & 0 \end{pmatrix} \]](https://idschool.net/wp-content/ql-cache/quicklatex.com-95cf90c44e1083a3d0d6f4dfc727f22c_l3.svg "Rendered by QuickLaTeX.com")
Matriks transformasi oleh pencerminan terhadap sumbu x:
![\[ T_{2} = M_{sb-x} = \begin{pmatrix} 1 & 0 \\ 0 & -1 \end{pmatrix} \]](https://idschool.net/wp-content/ql-cache/quicklatex.com-d82a1e8202e61a0b6cc853c5ac40288b_l3.svg "Rendered by QuickLaTeX.com")
Matriks transformasi oleh rotasi dengan R(O, 90o) kemudian dicerminkan terhadap sumbu x:
![\[ \left(T_{2} \cdot T_{1} \right) = \begin{pmatrix} 1 & 0 \\ 0 & -1 \end{pmatrix} \begin{pmatrix} 0 & -1 \\ 1 & 0 \end{pmatrix} = \begin{pmatrix} 0 & -1 \\ -1 & 0 \end{pmatrix} \]](https://idschool.net/wp-content/ql-cache/quicklatex.com-3e5ba319e2608c399f44d45691f3ebc7_l3.svg "Rendered by QuickLaTeX.com")
Matriks transformasi untuk menentukan bayangan:
![\[ \begin{pmatrix} x' \\ y' \end{pmatrix} = \begin{pmatrix} 0 & -1 \\ -1 & 0 \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix} \]](https://idschool.net/wp-content/ql-cache/quicklatex.com-b6a1f3694c0c2912f21838a4bfd7a56b_l3.svg "Rendered by QuickLaTeX.com")
![\[ = \begin{pmatrix} -y \\ -x \end{pmatrix} \]](https://idschool.net/wp-content/ql-cache/quicklatex.com-7a121e5ada6df65b1fed940fc7bc63a8_l3.svg "Rendered by QuickLaTeX.com")
Sehingga diperoleh dua persamaan:
![\[ y = -x' \]](https://idschool.net/wp-content/ql-cache/quicklatex.com-f0ba449e1ae74c583ec8fe7ad164de13_l3.svg "Rendered by QuickLaTeX.com")
![\[ x = - y' \]](https://idschool.net/wp-content/ql-cache/quicklatex.com-4358715d2b8861d9c97e9f0259b8a8aa_l3.svg "Rendered by QuickLaTeX.com")
Jadi, bayangan kurva y = -3 x + 1 oleh rotasi R(O, 90o kemudian dicerminkan terhadap sumbu x adalah
![\[ - x' = -3 (- y') + 1 \]](https://idschool.net/wp-content/ql-cache/quicklatex.com-184512ef0a4f4ebf79880b64968dc635_l3.svg "Rendered by QuickLaTeX.com")
![\[ - x' = 3y' + 1 \]](https://idschool.net/wp-content/ql-cache/quicklatex.com-7cbf3017b498c73cb31ce9f477125a31_l3.svg "Rendered by QuickLaTeX.com")
![\[ 3y = - x - 1 \]](https://idschool.net/wp-content/ql-cache/quicklatex.com-38ab8a2655bc85208cb1b6e2c8ea96e3_l3.svg "Rendered by QuickLaTeX.com")
6. Bayangan kurva  , oleh dilatasi pusat O dengan faktor skala 2, dilanjutkan pencerminan terhadap sumbu y, adalah ….
, oleh dilatasi pusat O dengan faktor skala 2, dilanjutkan pencerminan terhadap sumbu y, adalah ….
Pembahasan:
Matriks transformasi oleh dilatasi pusat O dengan faktor skala 2:
![\[ T_{1} = [O, 2] = \begin{pmatrix} 2 & 0 \\ 0 & 2 \end{pmatrix} \]](https://idschool.net/wp-content/ql-cache/quicklatex.com-ec9fca0e907b7b33b5fd05a964e7c08c_l3.svg "Rendered by QuickLaTeX.com")
Matriks transformasi pencerminan terhadap sumbu y:
![\[ T_{2} = M_{sb-y} = \begin{pmatrix} -1 & 0 \\ 0 & 1 \end{pmatrix} \]](https://idschool.net/wp-content/ql-cache/quicklatex.com-dd74b2be8d6397950b66b191b8c7e60c_l3.svg "Rendered by QuickLaTeX.com")
Matriks transformasi dilatasi pusat O dengan faktor skala 2 dilanjutkan pencerminan terhadap sumbu y:
![\[ \left(T_{2} \cdot T_{1} \right) = \begin{pmatrix} -1 & 0 \\ 0 & 1 \end{pmatrix} \begin{pmatrix} 2 & 0 \\ 0 & 2 \end{pmatrix} = \begin{pmatrix} -2 & 0 \\ 0 & 2 \end{pmatrix} \]](https://idschool.net/wp-content/ql-cache/quicklatex.com-bd0fc27f77c105723f35196445533ed8_l3.svg "Rendered by QuickLaTeX.com")
Matriks transformasi untuk menentukan bayangan:
![\[ \begin{pmatrix} x' \\ y' \end{pmatrix} = \begin{pmatrix} -2 & 0 \\ 0 & 2 \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix} \]](https://idschool.net/wp-content/ql-cache/quicklatex.com-812dfefaa78fa228ba46196b892c7d7b_l3.svg "Rendered by QuickLaTeX.com")
![\[ = \begin{pmatrix} -2x \\ 2y \end{pmatrix} \]](https://idschool.net/wp-content/ql-cache/quicklatex.com-3d8f316f9c24aa361075bdec592ea5e6_l3.svg "Rendered by QuickLaTeX.com")
Sehingga diperoleh dua persamaan:
![\[ x = - \frac{1}{2}x' \]](https://idschool.net/wp-content/ql-cache/quicklatex.com-2e41132d840f72a2bb806519ac7007c0_l3.svg "Rendered by QuickLaTeX.com")
![\[ y = \frac{1}{2}y' \]](https://idschool.net/wp-content/ql-cache/quicklatex.com-9ff69e00f97158e9a2e5ed9089fb3c99_l3.svg "Rendered by QuickLaTeX.com")
Jadi, bayangan kurva oleh dilatasi pusat O dengan faktor skala 2 dilanjutkan pencerminan terhadap sumbu y adalah
![\[ \frac{1}{2}y' = \left( - \frac{1}{2} x' \right )^{2} - 1 \]](https://idschool.net/wp-content/ql-cache/quicklatex.com-2d0535785e508efcba8189706427c5a2_l3.svg "Rendered by QuickLaTeX.com")
![\[ y = \frac{1}{2}x^{2} - 2 \]](https://idschool.net/wp-content/ql-cache/quicklatex.com-ea96ea5c11f000e47890ca8385130fb9_l3.svg "Rendered by QuickLaTeX.com")
7. Persamaan bayangan kurva y = 3x2 + 2x − 1 oleh pencerminan terhadap sumbu X dilanjutkan dengan pencerminan terhadap sumbu Y adalah ...
Misalkan :
T1 = matriks yang bersesuaian dengan pencerminan terhadap sumbu X.
T2 = matriks yang bersesuaian dengan pencerminan terhadap sumbu Y.
T = T2 o T1
T1=[100−1] dan T2=[−1001]
T=[−1001][100−1]=[−100−1]
Bayangan titik (x, y) oleh transformasi T adalah :
[x′y′]=[−100−1][xy]
[x′y′]=[−x−y]
Dari persamaan matriks diatas, diperoleh :
x' = -x ↔ x = -x'
y' = -y ↔ y = -y'
Substitusi x dan y ke persamaan kurva :
y = 3x2 + 2x − 1
⇒ (-y') = 3(-x')2 + 2(-x') − 1
⇔ -y' = 3(x')2 − 2x' − 1
⇔ y' = −3(x')2 + 2x' + 1
Jadi, persamaan bayangan kurva adalah :
y = −3x2 + 2x + 1
8. Diketahui titik A(3, -2) dipetakan oleh translasi T = [1−2], kemudian dilanjutkan oleh rotasi dengan pusat O(0, 0) sejauh 90°. Koordinat titik hasil peta A adalah ...
Pembahasan=
Bayangan titik A(3, -2) oleh translasi [1−2] adalah
[x′y′]=[3−2]+[1−2]
[x′y′]=[4−4]
dilanjutkan rotasi dengan pusat O sejauh 90° :
[x′′y′′]=[cos90∘−sin90∘sin90∘cos90∘][x′y′]
[x′′y′′]=[0−110][4−4]
[x′′y′′]=[44]
Jadi, koordinat titik hasil peta adalah (4, 4)x+y−1=02x+y−1=0
9.Perhatikan grafik berikut.
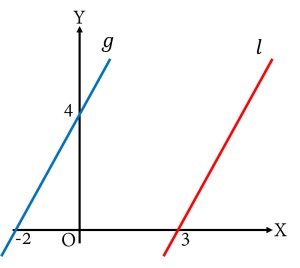
Salah satu translasi yang dapat memindahkan garis g ke garis l adalah ⋯⋅Secara geometri, kita dapat melakukan translasi pada titik ke titik yang dilalui masing-masing garis tersebut.
Dari titik (−2,0) bergeser 5 satuan ke kanan (+5) menuju titik (3,0) sehingga translasi yang sesuai adalah [50].
Selain itu, bisa juga dari titik (0,4) lalu digeser ke bawah sejauh 4 satuan (−4) dan 3 satuan ke kanan (+3) menuju titik (3,0) sehingga translasi yang sesuai adalah [3−4].
10. Persamaan bayangan garis 2 ditransformasikan oleh matriks (1112) kemudian dilanjutkan dengan pencerminan terhadap sumbu-X adalah ⋯⋅
Bayangan titik (x,y) oleh transformasi matriks dapat dinyatakan oleh skema:
(xy)(1112)−−−−−→(x′y′)=[(1112)(xy)]=(x+yx+2y)
Transformasi titik dilanjutkan oleh pencerminan (refleksi) terhadap sumbu-X sehingga diperoleh
(x+yx+2y)Rx−→(x+y−x−2y)
Diperoleh x′′=x+y dan y′′=−x−2y.
Dengan menggunakan konsep penyelesaian SPLDV, diperoleh
{−y=x′′+y′′x=2x′′+y′′
Substitusikan ke 2x+y−1=0, sehingga diperoleh
2(2x′′+y′′)−(x′′+y′′)−1=03x′′+y′′−1=0
Dengan menghilangkan tanda dobel aksen, diperoleh persamaan bayangan garisnya, yakni 3x+y−1=03x+y−1=0


Comments
Post a Comment